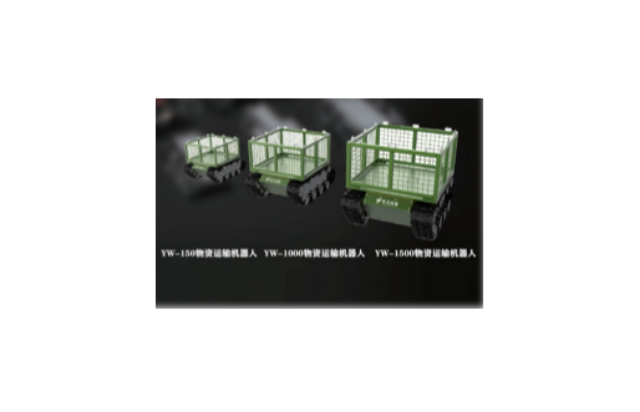
履带式心战机器人的工作原理深度融合了机械结构设计与智能行为预测技术,其重要在于通过履带底盘的复杂地形适应能力与意图解析算法的协同运作,实现战场环境下的心理战目标。该类机器人采用强度高金属履带与可变形悬挂系统,履带由多节链板组成,通过驱动轮与从动轮的啮合实现连续运动,其接地压力分布设计可降低对松软地面的压强,使机器人能在山地、沼泽等复杂地形中稳定行进。在越障过程中,悬挂系统通过四连杆机构动态调整履带接地长度,当机器人攀爬30°斜坡时,悬挂系统将重心前移,同时履带与地面接触面积增大,摩擦力提升23%,确保机器人不会因打滑而暴露位置。这种机械结构的优化不仅提升了物理隐蔽性,更为心理战行动提供了稳定的移动平台——机器人可携带全向声学阵列与全息投影设备,在行进过程中持续释放定制化心理干扰信号。履带式物资运输机器人可适应陡坡,完成物资爬坡运输。苏州全地形履带式机器人
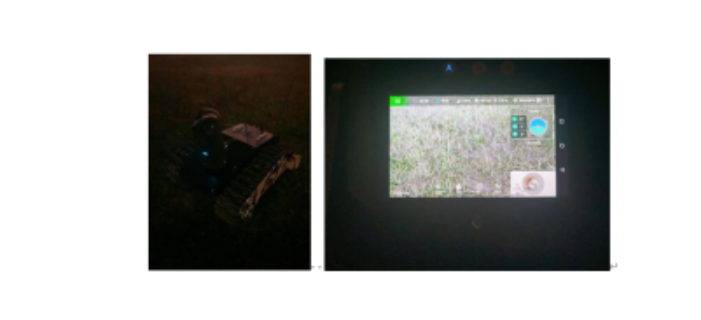
履带式全彩夜视巡防侦察机器人在现代安防领域扮演着至关重要的角色。它们凭借强大的机动性和适应复杂地形的能力,能够在各种夜间或光线微弱的环境下执行巡逻任务。这类机器人装备了先进的全彩夜视摄像头,即使在漆黑的夜晚,也能提供清晰、真实的彩色图像,使得监控人员能够准确判断现场情况。此外,它们还具备智能分析功能,能够自动识别异常行为或潜在威胁,及时发出警报,为安全保卫工作提供强有力的支持。履带式设计让这种机器人在崎岖不平、泥泞湿滑的地面上也能保持稳定,确保任务的顺利进行。无论是城市街道、工业园区还是边境巡逻,履带式全彩夜视巡防侦察机器人都能发挥出其独特的优势,成为现代安防体系中不可或缺的一部分。苏州全地形履带式机器人履带式机器人能应对粗糙路面,物资运输机器人借此在工地等顺畅运输。
履带式察打一体机器人的工作原理深度融合了机械结构设计与智能控制技术,其重要在于通过履带底盘实现复杂地形的稳定移动,同时集成多模态侦察系统与精确打击模块。履带底盘采用强度高橡胶或金属材质履带,配合单独悬挂系统与差速驱动轮,能够在沙地、泥泞、碎石等非结构化地面保持高通过性。例如,某型矿井探测机器人通过附加履刺的橡胶履带增加摩擦力,配合四连杆变形机构调整重心高度,使其在含煤泥、碎石的斜坡上爬坡角度可达30度,且滑转率控制在15%以内。这种设计不仅分散了机器人对地面的压强,还通过悬挂系统吸收冲击能量,确保侦察设备在颠簸环境中的稳定性。
履带式救援机器人注重智能化和自主化功能的开发。通过集成先进的导航系统和人工智能算法,这些机器人能够在一定程度上实现自主导航和避障,减轻救援人员的负担。在夜间或视线不佳的环境中,它们能依靠内置的光学识别和声音定位技术,准确找到被困人员的位置。同时,机器人还具备远程操控功能,救援人员可以在安全地带通过无线设备指挥其行动,确保救援行动的安全和高效。这些智能化功能不仅提升了救援效率,也为救援人员提供了更多的安全保障,是现代救援体系中不可或缺的一部分。履带式机器人可原地转向,这个功能让物资运输机器人在狭小处轻松运输。
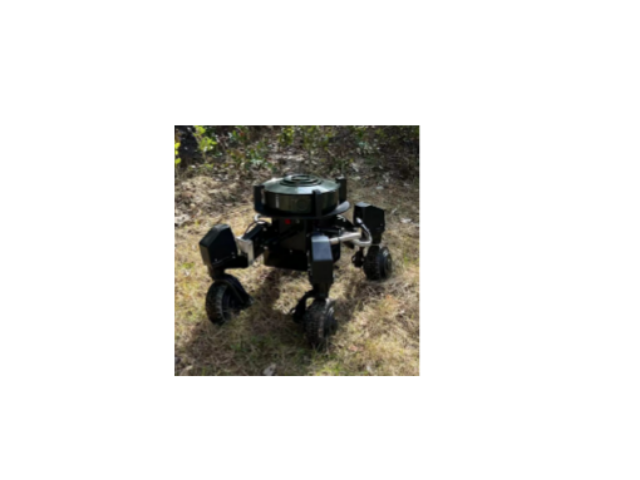
小型履带式心战机器人的工作原理深度融合了机械传动、环境感知与智能决策技术,其重要在于通过履带式底盘实现复杂地形的稳定移动,并依托多传感器系统完成战场心理战信息的精确采集与动态干预。履带行走机构采用四轮一带结构,即驱动轮、支重轮、导向轮、拖带轮与强度高橡胶履带协同工作,驱动轮通过永磁直流电机直接驱动,电机转速经行星减速器降速增扭后传递至履带,确保机器人能在沙地、碎石坡、泥泞等非结构化地形中保持低打滑率与高通过性。矿山开采,履带式物资运输机器人协助运输矿石等物资。苏州全地形履带式机器人
履带式机器人的防滑性强,在湿滑地面上物资运输机器人运输不滑跤。苏州全地形履带式机器人
小型履带式心战机器人凭借其独特的机械结构与智能化设计,在心理战领域展现出多维度的战术价值。以俄罗斯标识器作战机器人为例,其模块化设计使其可快速集成声光攻击系统、多语种喊话模块及全息投影装置,在复杂战场环境中实施精确心理干预。该机器人搭载的神经网络算法可实时分析目标群体的情绪波动,通过调整激光频闪频率、语音语调及投影内容,制造出符合敌方文化禁忌的视觉冲击——如在聚居区投射《古兰经》经文扭曲影像,或在夜间利用热成像伪装成幽灵形态接近敌方哨所。其三轴双光热成像云台相机配合16线激光雷达,可在500米距离外识别敌方士兵面部微表情,当检测到恐惧或困惑情绪时,自动触发预设的心理战程序。苏州全地形履带式机器人
昆山辰福元电子科技有限公司免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的商铺,信息的真实性、准确性和合法性由该信息的来源商铺所属企业完全负责。本站对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。
友情提醒: 建议您在购买相关产品前务必确认资质及产品质量,过低的价格有可能是虚假信息,请谨慎对待,谨防上当受骗。